Training Quadrotor UAV Platform Setup with ROS
Date
Nov 2019 - Feb 2020
Location
SEARCH Lab, University of Strathclyde, Glasgow
Project type
PhD Project
Role
-
System Integration Engineer
-
Flight Control Developer
-
Test & Validation Lead
Publication
Developed a custom quadrotor training platform using ROS for autonomous flight. The redesigned UoS RSA features composite propellers, AC brushless motors with a PX4 autopilot on Raspberry Pi 4, and is powered by a 4S 200mAh battery (supporting a 1.5 kg payload with a 20-minute flight time). A VICON system provides real-time 6DOF tracking for precise indoor navigation, while Python-based flight tests (hovering and circular paths) are visualized via RVIZ. This platform is a testbed for advanced flight control and sensor integration.
The Python program based on ROS has been implemented for UAV hovering and different path using PX4 platform. The basic hovering test (UAV remains fixed target position and orientation) has been implemented. Even though manual disturbance was added to the UAV, it is able to return to its original hovering position automatically.
A circular path is written in Python to enable the UAV to rotate around a cylinder with a centre of two meters, to rise by 0.2 meters in height and then to rotate around the cylinder again with a centre of two meters, flying around the wind turbine.
RVIZ is a ROS graphical interface that allows you to visualise a lot of information, using plugins for many kinds of available topics. The real-time path of the UAV, which followed the designed path, can also be achieved through ROS on the ground station computer.

The modified UoS UAV training platform is redesigned in this project. This newly-developed custom quadrotor specification features four 10x45 composite standard size propellers, driven by three-phase alternating current (AC) brushless motor (Robbe-Roxxy 2827-34). To convert direct current (DC) to low voltage AC power, corresponding 40A electronic speed controller (ESC) is used. The power is supplied by 4S 200mAh 14.8V battery, allowing 1.5kg payload capacity and around 20 minutes running time to carry inspection equipment and sensor. The quadrotor flight control and stabilisation are undertaken by PX4 autopilot platform, running a Raspberry Pi 4 tiny computer with 8G RAM.
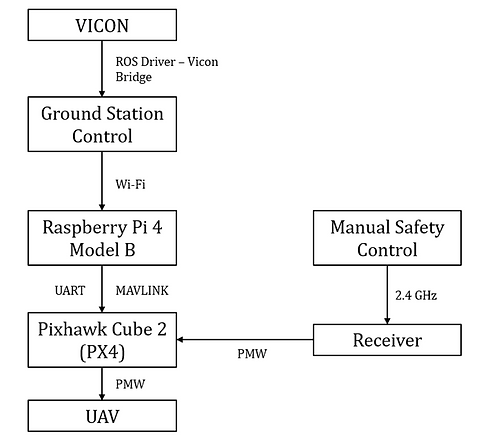
The platform communicates to a host controller computer (Ground Station) through a standard IEEE 802.11g wireless communication channel.
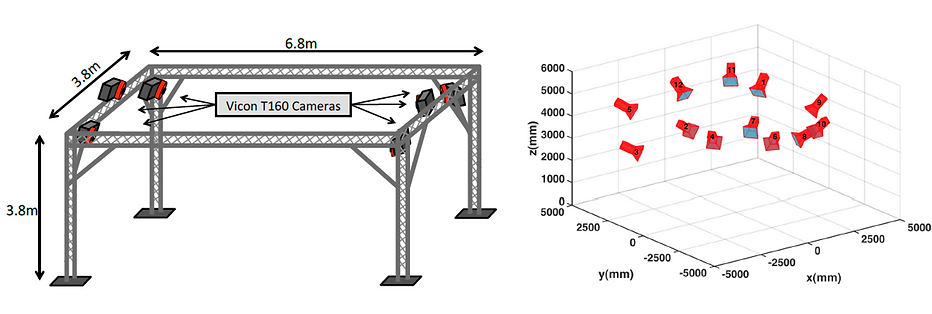
An external VICON tracking system is used to determine the real-time position and six degrees of freedom (6DOF) position of the aerial platform. By arranging a number (>3) of retro-reflective markers, full position, and orientation information can be achieved in real-time with a refreshing rate of 100Hz. In this way, with the additional tool kit, the autonomous flight can be implemented in the indoor environment.